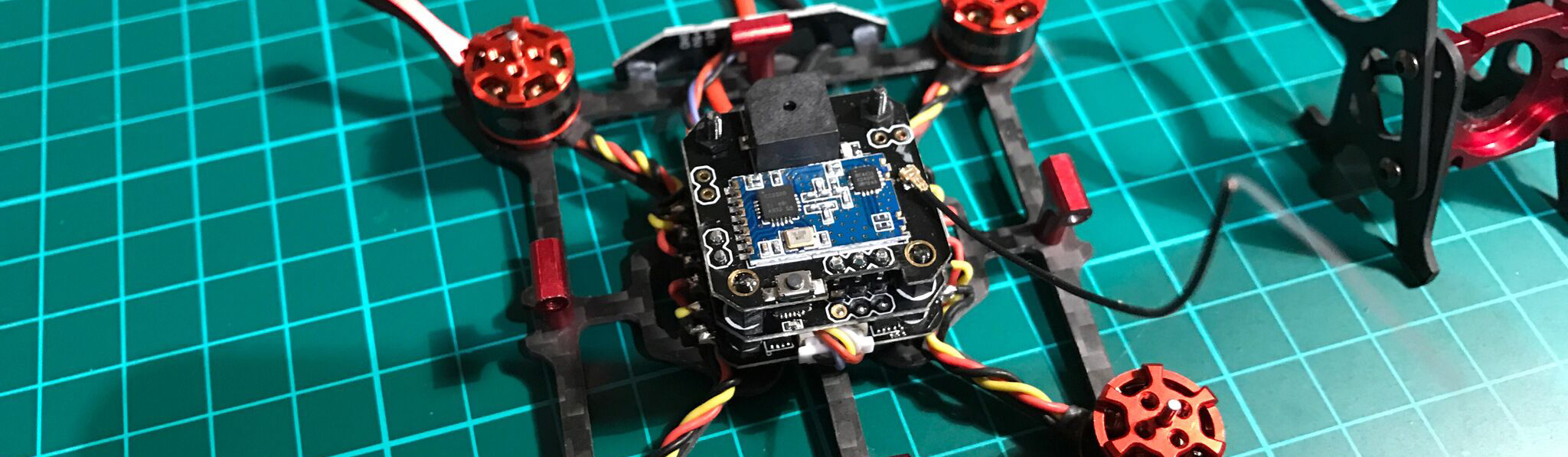
Après avoir passé en revue les kits tout faits ainsi que quelques châssis et moteurs pour les micro-quads il est temps de passer au coeur du sujet. Les contrôleurs de vol et les ESC pour ce type d’engin.
Qui dit micro quad dit micro composants. On va donc abandonner les composants standard de taille 36mm x 36mm pour adopter la taille micro : 27mm x 27mm (et trous de montage 20mm x 20mm). On attaque.
On va s’intéresser à présent aux constructions custom et là c’est le bonheur vu qu’il y’a plein de nouveaux composants dédiés a ce type de mini-montage. On va pouvoir aussi compter sur les pièces détachées pour les modèles qu’on a vu dans l’article précédent sur ces micro-quads brushless.
Les micro-quads sont un peu ma passion du moment. Ma définition de « micro » est un petit quadcoptère dont la distance entre les moteurs est inférieure ou égale à 90mm. Donc de la taille d’un Hubsan X4 ou inférieur.
Eachine Aurora 90 brushless micro quad
On trouve beaucoup de petits modèles tout faits ou à assembler soi même avec des moteurs brushed. Par exemple le Eachine QX90 ou les « Tiny Whoop » à faire soi même ou à acheter tout faits pour les customiser (Eachine E010 ou Blade Inductrix). L’inconvenient des moteurs brushed est leur manque cruel de puissance. C’est mou.
Du coup faisons un petit tour d’horizon de ce que l’on trouve pour acheter ou monter un « vrai » micro-quad (avec des moteurs brushless et des ESC). Ça tombe bien, on trouve de plus en plus de choses en ce moment. On fait un petit état des lieux ?
Dans l’article sur la construction d’un Tiny Whoop on avait vu que le choix des composants est primordial pour maintenir le poids le plus bas possible. Le but est de garder des performances de vol optimales.
Mon choix initial pour la caméra FPV était très mauvais car trop lourd. Je me suis donc lancé dans la recherche d’une caméra mieux adaptée et je pense être tombé sur ce qui semble être un des meilleurs choix du moment … si ce n’est le meilleur.
J’écris cet article car je suis un idiot qui a tendance à manquer d’attention dans ses montages. Cela conduit parfois à des dégâts matériels et potentiellement des bobos pour soi et/ou pour les autres.
L’installation des moteurs est une bonne source d’erreurs notamment quand vous utilisez des moteurs dont le sens de rotation est pré-déterminé (CW ou CCW, sens horaire ou anti-horaire) par leur filetage.
Comme vous pouvez le constater sur cette photo, issue de mon dernier montage, les vis de ces moteurs DYS BX1306 sont soit noires soit argentées. Elles correspondent à un sens de rotation du moteur (horaire ou anti-horaire donc).
Comme son titre l’indique, ce livre propose des projets de drones basés sur Arduino. A travers plusieurs examples de montages à réaliser pas à pas l’auteur nous présente les composants et principes essentiels des drones.
C’est accessible sans trop de connaissances et c’est plutôt bien fait. Si vous avez envie d’un peu de lecture et que vous aimez faire les choses vous même n’hésitez pas.
Bon, il est temps de reprendre ce montage de mini drone 130mm laissé en souffrance depuis 2 mois. La raison tient à des péripéties logistiques. En effet les moteurs commandés à l’origine (des DYS BE1104 7000Kv) ne sont jamais arrivés.
Perte de temps donc mais cela m’a permis de réfléchir un peu plus au montage et faire quelques adaptations par rapport à ce qu’on a vu dans l’article précédent.
Il est temps à présent de passer en revue la fin du montage et les changements que j’ai effectué.
Pour le principe, le Tiny Whoop est un micro quad destiné au vol en intérieur équipé d’un système FPV. L’idée est souvent de prendre un petit quad comme le Blade Inductrix de Horizon Hobby ou le Eachine E010 et de l’équiper d’une micro caméra FPV.
On trouve beaucoup de ressources, d’idées et de composants pour fabriquer ou customiser son Tiny Whoop et il y’a vraiment une grosse communauté autour de ce type de montage.
Ce que j’ai voulu faire c’est fabriquer mon propre quad en partant de zero (en choisissant tous les composants). Je vais donc essentiellement partager ma liste de composants et mes étapes de montage. On attaque ?
En approche, le Eachine Aurora 90 est un mini quad FPV de 90mm. Habituellement à cette taille on a faire à des moteur brushed.
Or ici ce n’est pas le cas. C’est un quad brushless équipé de moteurs 1104 7500Kv pilotés par un ESC 4 en 1 de 10A. Bref, un modèle assemblé très prometteur.
Le tarif annoncé est d’environ 145$, chez Banggood, pour un modèle BNF doté d’un récepteur compatible FrSky, FlySky ou DSM/DSMX. A titre de comparaison, un Moskito 70 brushless coute 245$ chez FuriousFPV (certes plus petit mais a fonctionnalités assez similaires).
Le triste constat est que mes quads sont tous presque finis, il manque toujours une petite pièce à monter, un détail à changer. Enervant mais j’ai profité de l’arrivée de toutes dernières pièces manquantes pour finir au moins mon QAV-R 180mm.
J’adore ce modèle et je trouvais dommage qu’il ne soit pas en état de voler depuis de nombreux mois, c’est chose réparée à présent.